







ZCD Series Inline Planetary Gearbox
The ZCD Series inline planetary gearbox is designed for servo-driven systems requiring compact structure, high torque capacity, reliable precision, and smooth motion transmission. It is suitable for CNC machines, robotics, automation equipment, packaging machinery, and precision industrial drive systems.
Request a Quote View Technical Data
Key Advantages of ZCD Series
Compact Inline Design
Coaxial input and output structure for space-saving servo drive layouts.
High Torque Capacity
Designed for stable torque output in demanding industrial applications.
Precision Transmission
Suitable for positioning, indexing, feeding, and controlled motion systems.
Wide Ratio Range
Available with L1 and L2 ratios for different speed and torque requirements.
Ordering Code Representation
The ZCD model code defines the gearbox series, frame size, speed ratio, motor shaft diameter, motor pilot diameter, motor mounting hole pitch, and mounting screw size.
ZCD Series
60 / 90 / 120 / 140 / 200
L1: 4–10
L2: 16–100
Motor Interface and Installation Dimensions
Before ordering, please confirm the servo motor interface, flange size, shaft diameter, mounting hole pitch, and screw size. These values affect motor matching and installation accuracy.
Motor Shaft Diameter
Confirm the motor shaft size before selecting the gearbox input bore.
Motor Pilot Diameter
The pilot diameter helps align the motor and gearbox input side accurately.
Mounting Hole Pitch
Check the motor mounting hole distance to match the adapter flange.
Mounting Screw Size
Select the correct screw size to ensure stable motor installation.
Reducer Operating Condition Selection Table
The service factor should be selected according to load type, starts per hour, and daily operating time. For continuous operation or large output inertia, a larger gearbox frame may be recommended.
| Load Type | Starts per Hour (Z) | h ≤ 4 | 4 ≤ h ≤ 8 | 8 ≤ h ≤ 12 | 12 ≤ h ≤ 16 | 16 ≤ h ≤ 24 |
|---|---|---|---|---|---|---|
| Even and Stable Load | Z ≤ 10 | 0.9 | 1.0 | 1.1 | 1.4 | 1.8 |
| 10 ≤ Z ≤ 30 | 1.0 | 1.2 | 1.3 | 1.6 | 2.0 | |
| 30 ≤ Z ≤ 100 | 1.2 | 1.4 | 1.5 | 1.8 | 2.2 | |
| Medium Shock Load | Z ≤ 10 | 1.4 | 1.5 | 1.8 | 2.2 | |
| 10 ≤ Z ≤ 30 | 1.4 | 1.6 | 1.65 | 2.0 | 2.5 | |
| 30 ≤ Z ≤ 100 | 1.6 | 1.8 | 2.0 | 2.2 | 2.8 | |
| Heavy Shock Load | Z ≤ 10 | 1.6 | 1.8 | 2.2 | 2.2 | 2.8 |
| 10 ≤ Z ≤ 30 | 1.8 | 2.0 | 2.4 | 2.4 | 3.0 | |
| 30 ≤ Z ≤ 100 | 2.0 | 3.0 | 2.7 | 2.7 | 3.3 |
Reducer Performance Parameter Table
The following data is suitable for preliminary model comparison. Final selection should be confirmed according to motor power, ratio, load inertia, working cycle, installation direction, and actual machine structure.
| Item | Unit | Stage | Ratio | ZCD60 | ZCD90 | ZCD120 | ZCD140 | ZCD200 | ZCD255 |
|---|---|---|---|---|---|---|---|---|---|
| Rated Output Torque T2N | Nm | L1 | 4 / 5 / 7 / 10 | 40 | 125 | 260 | 650 | 1100 | 2100 |
| Rated Output Torque T2N | Nm | L2 | 16 / 20 / 25 / 32 / 40 / 50 / 64 / 80 / 100 | 23 | 85 | 230 | 550 | 950 | 1800 |
| Maximum Output Torque T2B | Nm | L1 / L2 | 4–100 | 2.5 × rated torque | |||||
| Rated Input Speed n1N | rpm | L1 / L2 | 4–100 | 4000 | 4000 | 3500 | 3000 | 2500 | 2000 |
| Maximum Input Speed n1B | rpm | L1 / L2 | 4–100 | 8000 | 8000 | 6000 | 6000 | 5000 | 4000 |
| Backlash P2 | arcmin | L1 | 4–10 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 |
| Backlash P2 | arcmin | L2 | 16–100 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 |
| Torsional Rigidity | N·m/arcmin | L1 / L2 | 4–100 | 4 | 8 | 18 | 50 | 145 | 225 |
| Allowable Radial Force F1 | N | L1 / L2 | 4–100 | 680 | 1750 | 3080 | 9400 | 14500 | 22000 |
| Allowable Axial Force F2 | N | L1 / L2 | 4–100 | 340 | 875 | 1540 | 4700 | 7250 | 11000 |
| Service Life | hr | L1 / L2 | 4–100 | 20000 h continuous operation | |||||
| Efficiency η | % | L1 | 4–10 | ≥97% | |||||
| Efficiency η | % | L2 | 16–100 | ≥94% | |||||
| Weight | kg | L1 | 4–10 | 1.1 | 2.9 | 5.4 | 11.9 | 31.6 | 56.1 |
| Weight | kg | L2 | 16–100 | 1.7 | 4.2 | 8 | 15.9 | 36.9 | 70.4 |
| Protection Level | – | L1 / L2 | 4–100 | IP65 | |||||
| Noise | dB | L1 / L2 | 4–100 | ≤56 | ≤58 | ≤62 | ≤65 | ≤70 | ≤75 |
| Operating Temperature | ℃ | L1 / L2 | 4–100 | -10℃ to +90℃ | |||||
| Lubrication Method | – | L1 / L2 | 4–100 | Long-term lubrication | |||||
Moment of Inertia of Reducer
Moment of inertia is important for servo motor matching, acceleration, deceleration, and positioning control.
| Series | Ratio | ZCD60 | ZCD90 | ZCD120 | ZCD140 | ZCD200 | ZCD255 |
|---|---|---|---|---|---|---|---|
| L1 / kg·cm² | 4 | 0.18 | 0.67 | 2.87 | 7.54 | 25.03 | 58.31 |
| 5 | 0.17 | 0.65 | 2.71 | 7.42 | 23.29 | 53.27 | |
| 7 | 0.14 | 0.60 | 2.62 | 7.14 | 22.48 | 50.97 | |
| 10 | 0.14 | 0.58 | 2.57 | 7.03 | 22.51 | 50.56 | |
| L2 / kg·cm² | 16 | 0.18 | 0.65 | 0.58 | 2.8 | 7.42 | 23.29 |
| 20–35 | 0.17 | 0.60 | 0.47 | 2.71 | 7.06 | 22.51 | |
| 40–100 | 0.04 | 0.58 | 0.44 | 2.57 | 7.06 | 22.51 |
Outline Dimensional Drawing
The outline dimensional drawing provides detailed information on the input side, output side, mounting dimensions, shaft size, flange dimensions, and installation space. These drawings are essential for confirming compatibility with your equipment and ensuring accurate installation.
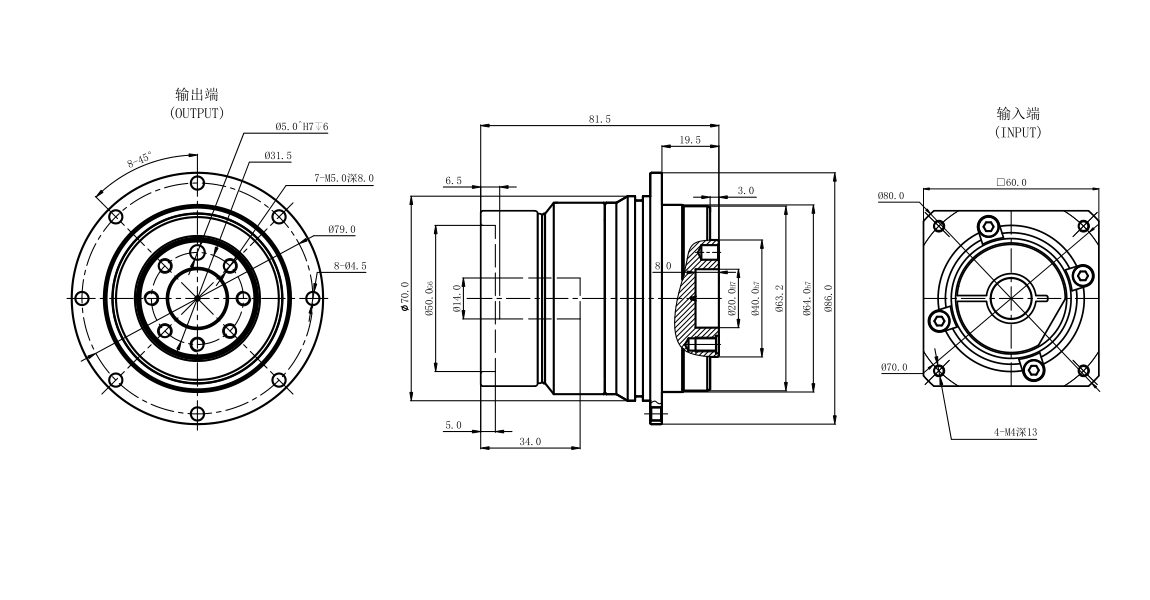
Dimension Table
| Size | LA | LZ | S | LR | LB | LE | LC | L |
|---|---|---|---|---|---|---|---|---|
| ZCD60-L1 | Φ70 | 4-M4,4-M5 | Φ11 / Φ14 | 34 | Φ50 | 5 | 60 | 81.5 |
| ZCD60-L2 | Φ70 | 4-M4,4-M5 | Φ11 / Φ14 | 34 | Φ50 | 5 | 60 | 110.5 |
| ZCD90-L1 | Φ90 | 4-M5,4-M6 | Φ19 | 43 | Φ70 | 6.5 | 90 | 100.5 |
| ZCD90-L2 | Φ90 | 4-M5,4-M6 | Φ19 | 42 | Φ70 | 7 | 90 | 134.5 |
| ZCD120-L1 | Φ145 | 4-M8 | Φ22 / Φ24 | 64 | Φ110 | 10 | 130 | 135 |
| ZCD120-L2 | Φ145 | 4-M8 | Φ22 / Φ24 | 59 | Φ110 | 10 | 130 | 169.5 |
| ZCD140-L1 | Φ200 | 4-M12 | Φ35 / Φ42 | 83 | Φ114.3 | 10 | 180 | 177 |
| ZCD140-L2 | Φ200 | 4-M12 | Φ35 / Φ42 | 83 | Φ114.3 | 10 | 180 | 232.5 |
| ZCD200-L1 | Φ200 | 4-M12 | Φ35 / Φ42 | 83 | Φ114.3 | 10 | 180 | 200 |
| ZCD200-L2 | Φ200 | 4-M12 | Φ35 / Φ42 | 83 | Φ114.3 | 10 | 180 | 263 |
Typical Applications
ZCD Series inline planetary gearboxes are suitable for servo-driven equipment requiring compact structure, stable torque transmission, and high precision motion control.
CNC Machines
Used in feed axes, rotary fixtures, tool changers, and precision positioning systems.
View CNC ApplicationsRobotics
Suitable for robot arms, end effectors, grippers, and servo positioning modules.
View Robotics ApplicationsAutomation Equipment
Applied in transfer systems, assembly equipment, inspection machines, and indexing units.
View Automation ApplicationsPackaging Machinery
Used in feeding, sealing, labeling, synchronized motion, and packaging line transmission.
View Packaging ApplicationsHow to Select a ZCD Planetary Gearbox
To select a suitable ZCD inline planetary gearbox, confirm the servo motor model, required ratio, output torque, input speed, load type, daily operating time, start-stop frequency, backlash requirement, radial load, axial load, and available installation space. For high-frequency operation or shock load conditions, choosing a larger frame size can improve reliability.
Related Planetary Gearbox Series

VRB Series
Inline planetary gearbox for precision servo transmission, compact layouts, and reliable industrial motion control.
View VRB Series
VRBR Series
Right angle planetary gearbox for 90-degree transmission, compact machine structures, and servo-driven positioning systems.
View VRBR Series
ZCDR Series
Right angle planetary gearbox for space-saving installation, automation equipment, packaging systems, and indexing applications.
View ZCDR SeriesNeed Help Selecting a ZCD Gearbox?
Send your motor model, torque requirement, ratio, installation space, and load condition. Our team can help recommend a suitable ZCD inline planetary gearbox.
Contact Us