







The question comes up constantly in machine design: the servo motor is selected, the load is defined, and now someone needs to decide what sits between them. “We need a gearbox” is straightforward. “Which gearbox” is where the real work begins.
A gearbox for servo motor applications isn’t simply any reducer that fits the shaft. Servo motors operate in closed-loop control — they read position, compare it to a command, and correct continuously. The gearbox is inside that feedback loop. Everything it contributes — its backlash, its compliance, its inertia, its drag — affects the loop’s ability to hold position and respond to commands. Get the gearbox selection wrong and the servo’s precision becomes irrelevant, because the drive chain can’t deliver it to the load.
This guide is for engineers and buyers who are at the beginning of that decision — who have a servo motor and need to understand what kind of gearbox fits it, why, and how to avoid the selection mistakes that cause problems at commissioning.
Why Servo Motors Need a Different Kind of Gearbox
Most industrial gearboxes are designed around one requirement: transmit power from a rotating source to a rotating load with a specified speed reduction. That’s necessary for a servo application too, but it’s not sufficient.
Servo drives are different from constant-speed or variable-frequency drives in a specific way: they command position, not just speed. A VFD running a conveyor belt doesn’t care exactly where the belt is at any given moment — it cares that it’s moving at the right speed. A servo positioning an assembly robot arm or a CNC axis cares exactly where the output is, continuously, to fractions of a millimetre or degree.
This creates requirements that standard industrial gearboxes don’t necessarily meet:
Low backlash. In a servo motor gearbox, backlash is a dead zone — a range of output positions that produce no input signal change when direction reverses. A servo controller that commands a 0.1mm move may get no output movement at all if the gearbox backlash exceeds the commanded distance. For precision motion control, this is not a minor inconvenience; it’s a fundamental accuracy limit.
Torsional stiffness. A compliant gearbox — one that winds up under torque before transmitting it — introduces phase lag into the control loop. The motor moves, the output lags, the controller overcorrects, and the system hunts. High torsional stiffness keeps the output responsive to input commands without the compliance-induced oscillation that destabilises servo loops.
Defined, published inertia. The reflected inertia of the gearbox — its own rotor inertia divided by the square of the ratio — contributes to the total load the servo motor must accelerate. A gearbox designed for servo integration publishes this figure. A standard industrial gearbox may not.
Consistent performance across the speed range. Servo axes run from near-zero speed to full rated speed, including slow precise moves and rapid traverses. A gearbox with high static friction or stick-slip behaviour at low speeds makes slow precise positioning difficult to control.
Standard industrial gearboxes are designed to transmit continuous power at steady state. Servo gearboxes are designed to transmit dynamic, reversing loads with positional accuracy. The difference is real and it shows up in the specifications — and in the machine’s performance.
Gearbox Types for Servo Motor Applications — What Actually Fits
Not all gearbox types are equally suited to servo motor and gearbox integration. Understanding the options and their limits helps narrow the field before getting into specific products.

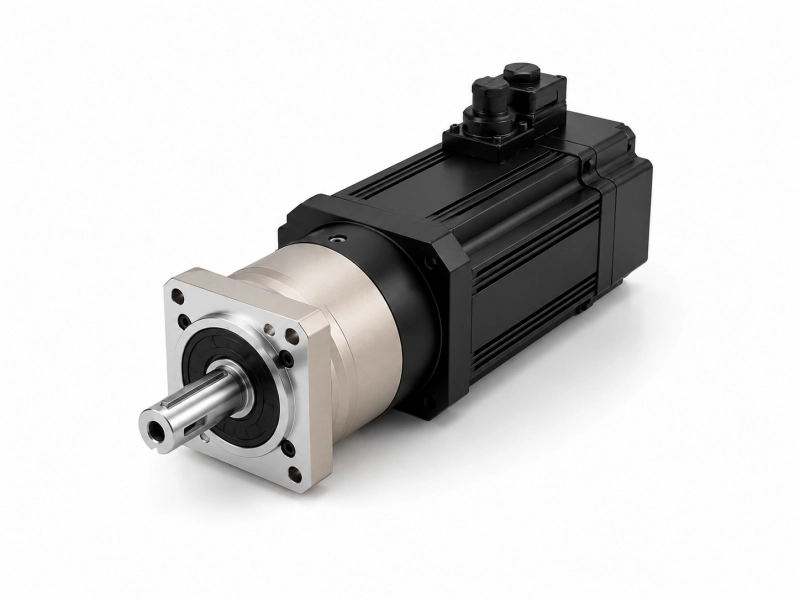
Planetary Gearbox
The planetary gearbox for servo motor applications is the dominant solution in precision industrial automation, and for good reason. The multi-planet load sharing geometry delivers high torque density in a compact coaxial package. Precision grades with ground gear teeth achieve backlash below 3 arcminutes — sometimes below 1 arcminute for high-precision grades. The coaxial input-output geometry aligns cleanly with servo motor shafts. Published specifications include backlash, torsional stiffness, and rotor inertia — the parameters a servo application actually needs.
For most servo-driven positioning, indexing, and contouring applications in industrial automation, the planetary gearbox is the correct starting answer. The question then becomes which planetary gearbox — inline or right-angle, single or multi-stage, which precision grade — which is a selection exercise rather than a type decision.
Helical Parallel-Shaft Gearbox
Helical gearboxes offer cost advantages and are available in a wide range of sizes and ratios. They perform well in continuous duty applications where torque is the dominant requirement and positioning accuracy is less critical. The offset-shaft geometry — input and output on parallel but non-coaxial shafts — adds a coupling or alignment step when connecting to servo motors, and the single-pair gear mesh means higher per-mesh loads and potentially lower torsional stiffness than an equivalent planetary unit.
For servo applications that require high torque but moderate positioning accuracy — large conveyor drives, heavy rotary tables in non-precision applications, large door or gate actuators — a helical gearbox paired with a servo motor can be appropriate. For precision motion control where backlash and stiffness matter, the planetary arrangement is a better fit.
Worm Gearbox
A worm gearbox paired with a servo motor with gearbox arrangement comes up occasionally, usually in applications where the right-angle output and high ratio in a single stage are attractive. The self-locking characteristic — the inability to back-drive through the worm — can be useful in vertical load applications where the load must hold position when the motor is unpowered.
The limitations for servo applications are significant. Worm gear efficiency is typically 70–90%, meaning 10–30% of the motor’s input power becomes heat in the gearbox. At servo power levels in continuous-duty applications, thermal management becomes a serious constraint. Backlash in worm gearboxes is typically higher than planetary alternatives at equivalent cost, and the sliding-contact tooth mesh means the friction characteristic is less consistent — which creates the stick-slip behaviour at low speeds that makes precise servo positioning difficult.
For servo applications with genuine position control requirements, worm gearboxes are generally the wrong tool. They belong in applications where the servo is primarily a speed or torque source, not a precision position source.
Harmonic Drive
Harmonic drives — also called strain wave gears — offer near-zero backlash and very high ratios in a single stage, making them attractive for applications where space is extremely constrained and backlash cannot be tolerated. They’re standard in some collaborative robot joints and in precision optical and semiconductor positioning equipment.
The tradeoffs are torque capacity and torsional stiffness. Harmonic drives have lower torsional stiffness than equivalent planetary gearboxes — the flex spline that gives them zero backlash is also compliant under load. This matters for applications with high dynamic loads or rapid direction changes. Torque capacity per unit diameter is also lower than planetary at the larger sizes. For applications that need both high torque and low backlash — heavy robotic joints, large-format CNC axes — a precision planetary gearbox often outperforms a harmonic drive at lower cost per Nm of output torque.
Servo Motor Gearboxes for Automation — Three Decisions Before Anything Else
Before selecting a specific product, three decisions define which portion of the gearbox catalogue is even relevant to a given servo motor gearboxes for automation application.
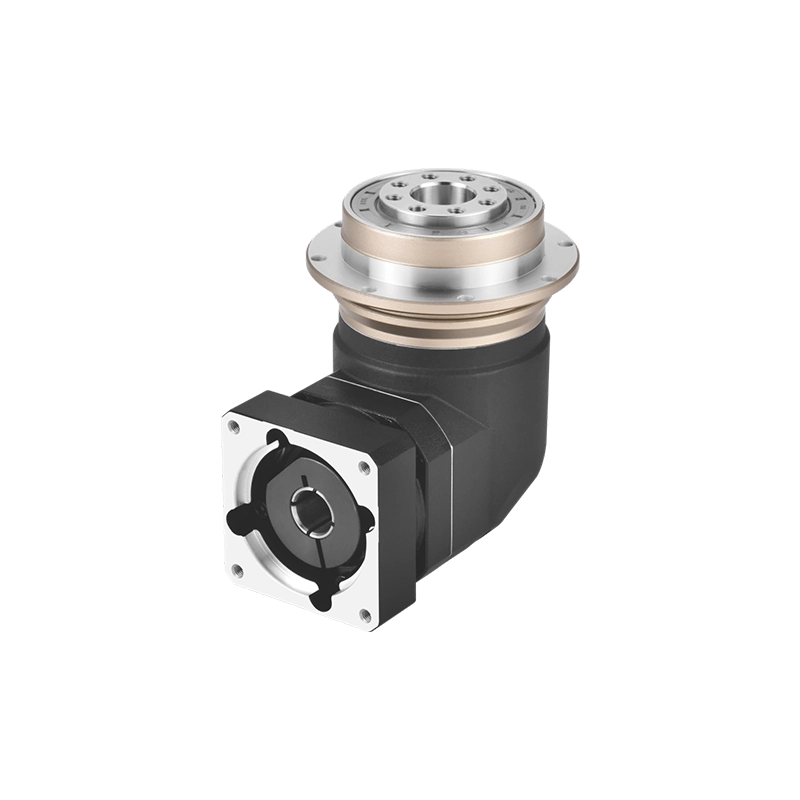
Decision 1 — Inline or right-angle?
This is a layout decision, not a performance decision. If the motor and load axes are coaxial or can be arranged that way, inline is almost always the correct choice: simpler mounting, no direction-change stage, better efficiency, potentially lower backlash at equivalent cost. If the machine layout requires the motor to be repositioned 90 degrees relative to the load axis, a right-angle gearbox is the correct tool.
Don’t choose right-angle because it seems compact or because a previous machine used one. Make the decision from the layout requirement.
Decision 2 — What backlash grade does the application actually need?
This is the question most buyers underspecify. The temptation is to specify the highest precision grade available — “better safe than sorry.” In practice, over-specifying backlash adds cost without improving performance in applications where the positioning tolerance is wide enough that standard grades are adequate.
The right way to determine the backlash requirement is to work backwards from the application’s positioning accuracy tolerance, subtract the contributions from other error sources (encoder, mechanical compliance, thermal), and set the backlash budget from what’s left. For most industrial servo positioning applications — assembly, dispensing, material transfer — ≤8 arcminutes is adequate. For precision contouring, tight-tolerance machining, and robotic path control, ≤3 arcminutes is the practical requirement. Below 1 arcminute is for the most demanding semiconductor and optical applications.
Decision 3 — What ratio is actually needed?
Ratio drives everything else. Too low a ratio and the motor runs at inefficient partial speed; too high and the reflected load inertia drops so far that the servo response becomes sluggish and control tuning is difficult. The target ratio is the one that puts the motor in its rated speed range at the application’s required output speed, while keeping the reflected inertia ratio within the range the servo manufacturer recommends — typically 1:1 to 5:1 for good dynamic performance.
Calculate the required ratio from motor speed and output speed. Then check the reflected inertia ratio. Adjust if needed. Then proceed to gearbox selection.
Allen Bradley Servo Motor Gearbox — and Other Brand-Specific Considerations
Engineers specifying a gearbox for servo motor integration with specific brands — Allen Bradley, Siemens, Fanuc, Yaskawa, Mitsubishi, Bosch Rexroth — often focus on the motor flange interface as the first compatibility question. This is correct: the input adapter must match the motor’s flange standard and shaft dimensions precisely, because misalignment at the motor connection adds to the effective backlash and can introduce shaft loads the motor bearing wasn’t designed for.
Most precision gearbox manufacturers offer input adapter plates for the common servo motor flange standards: IEC B5 and B14 in metric frame sizes (80mm, 100mm, 130mm, 180mm, 230mm), and NEMA frame sizes for North American motor families. Allen Bradley servo motor gearbox applications typically use NEMA 23, 34, or larger flange standards; European brands use IEC metric flanges. Confirm the specific motor model’s flange standard and shaft dimensions — not just the brand — before ordering.
Beyond the flange, brand compatibility considerations include:
Drive communication protocol. The gearbox itself is mechanical — it doesn’t communicate with the drive controller. However, if you’re specifying a complete servo motor and gearbox assembly, confirm that the motor’s encoder feedback type (incremental, absolute single-turn, absolute multi-turn) is compatible with your drive controller’s input.
Thermal rating at motor power. The continuous thermal power rating of the gearbox must exceed the continuous output power of the servo motor at its rated operating point. A gearbox matched to a motor by shaft interface but under-rated for the motor’s thermal output will overheat in continuous-duty applications.
Shaft connection method. Clamping hubs are standard for precision servo applications — they provide zero backlash at the motor connection and allow clean disassembly. Key connections are acceptable for lower precision grades; shrink disc connections are used for the highest torque ratings where clamping hub area is insufficient.
Planetary Gearbox Servo Motor Supplier — What to Look for
The planetary gearbox servo motor supplier relationship matters more in servo applications than in standard industrial gearbox procurement, because the technical integration questions are more specific and the consequences of a mismatch are more visible.
A supplier who understands servo integration can confirm:
- Backlash measurement method and whether unit-level data is available
- Motor adapter availability for your specific motor model and frame size
- Torsional stiffness specification and how it was measured
- Rotor inertia of the gearbox itself and how it contributes to the total reflected inertia
- Thermal rating at your operating temperature and duty cycle
- Ratio availability — whether your required ratio is in the standard range or a special
A supplier who responds to these questions with datasheet references only — without being able to explain the numbers — is a supplier who sells gearboxes as commodities. In servo applications, that distinction matters at commissioning.
At Zhuochuang, we manufacture precision planetary gearboxes built specifically for servo integration. Our planetary gearbox range includes inline and right-angle configurations with ground gear teeth, unit-level backlash testing, and input adapters for common servo motor brands. For standard servo-driven automation, packaging, and robotic applications, we stock the configurations most commonly requested and can advise on motor compatibility before the order is placed.
Summary: The Short Version
Choosing a gearbox for servo motor integration comes down to three type decisions and three parameter calculations, in that order:
Type decisions:
- Inline or right-angle — from the machine layout
- Gearbox type — planetary for most precision servo applications
- Precision grade — from the backlash requirement, which comes from the positioning accuracy tolerance
Parameter calculations:
- Gear ratio — from motor speed and required output speed
- Inertia ratio check — reflected load inertia divided by motor inertia, targeting ≤5:1
- Torque and thermal confirmation — rated and peak output torque against the gearbox specification, thermal rating against continuous duty cycle
Do these six things before looking at catalogues and the selection becomes straightforward. Skip them and the catalogue is just a list of products.
Browse our servo motor gearbox range → Contact us for application support and quotation →
Dongguan Zhuochuang Precision Machinery Co., Ltd planetdrivepro.com
Related reading: