







Servo Planetary Gearbox: How to Match a Gearbox with a Servo Motor
Learn how to match a servo planetary gearbox with a servo motor by checking gear ratio, reflected inertia, torque capacity, backlash, motor interface, mounting configuration, and duty cycle.
Servo motors are selected for precision, fast torque response, speed regulation, and repeatable motion control. However, the final performance of a servo system depends heavily on the mechanical transmission connected to the motor.
A servo planetary gearbox, also described as a planetary gearbox for servo motor applications, is commonly used in industrial automation to reduce speed, multiply torque, improve inertia matching, and preserve motion accuracy. But “servo planetary gearbox” is a product category, not a complete specification. Correct matching requires checking several engineering parameters in the right order.

A servo planetary gearbox should be selected according to motor speed, output torque, inertia ratio, backlash, mounting interface, and duty cycle.
Key Matching Factors for a Servo Planetary Gearbox
Gear Ratio
Ratio determines output speed, output torque, and reflected load inertia at the motor shaft.
Inertia Ratio
Inertia matching affects servo stability, response speed, tuning quality, and system vibration.
Torque Capacity
Continuous torque and peak torque should both be checked against the machine load profile.
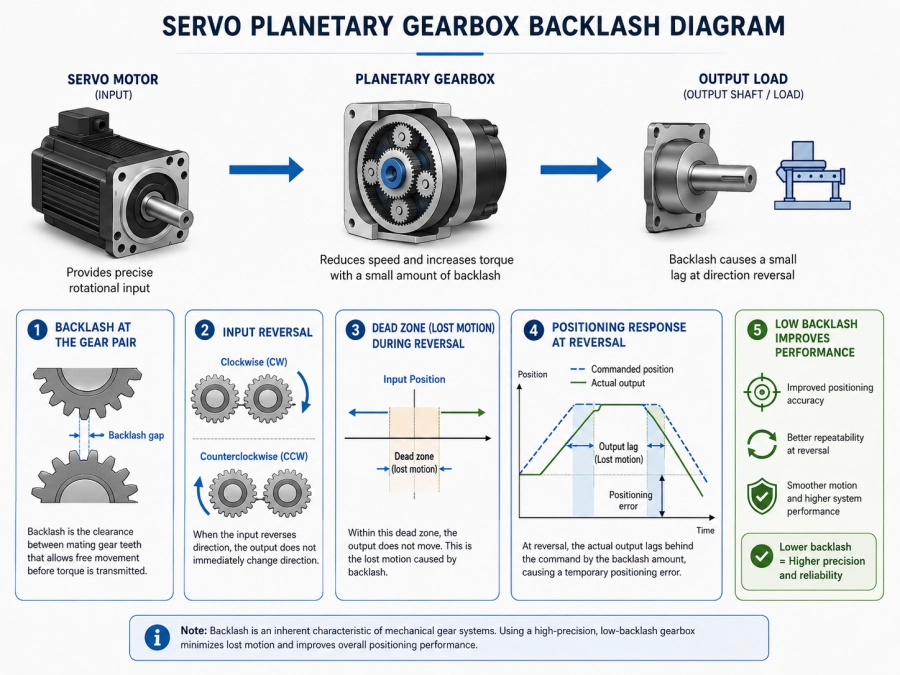
Backlash
Low backlash helps maintain positioning accuracy, repeatability, and stable direction reversal.
A suitable planetary servo gearbox should match the motor speed, torque curve, inertia ratio, backlash requirement, mechanical mounting layout, and expected duty cycle.
Why Servo Applications Need a Different Gearbox Standard
A servo motor is a closed-loop device. It reads position through an encoder, compares actual position with commanded position, and corrects continuously. The control loop can be tuned for fast response because the motor feedback is accurate and the motor dynamics are predictable.
What the servo loop cannot fully correct is mechanical error between the motor shaft and the load. Backlash, torsional compliance, inertia mismatch, poor mounting alignment, and thermal growth can all reduce the accuracy that reaches the final machine axis.
This is why servo planetary gearboxes are selected differently from general-purpose reducers. Important specifications include backlash, torsional stiffness, no-load drag torque, moment of inertia, mounting accuracy, thermal rating, and motor adapter compatibility. When selecting a planetary gearbox for servo motor integration, these details often matter as much as the ratio itself.
Step 1 — Define the Gear Ratio from Motor and Load Requirements
The gear ratio is usually the first parameter to check because it affects output speed, output torque, reflected inertia, and the number of gearbox stages required.
Required ratio = Motor rated speed ÷ Required output speed
Example: if a servo motor rated at 3,000 RPM drives a rotary axis that requires 120 RPM, the approximate ratio is 25:1.
In practice, ratio selection is often a range rather than one fixed number. The motor must provide enough torque across the required speed range, and gearbox efficiency should be considered when calculating available output torque.
For higher reduction ratios, a two-stage planetary servo gearbox may be required. Two planetary stages in series multiply the ratio, such as 5:1 × 5:1 = 25:1. The ratio split between stages can influence inertia, efficiency, noise, and available frame size.
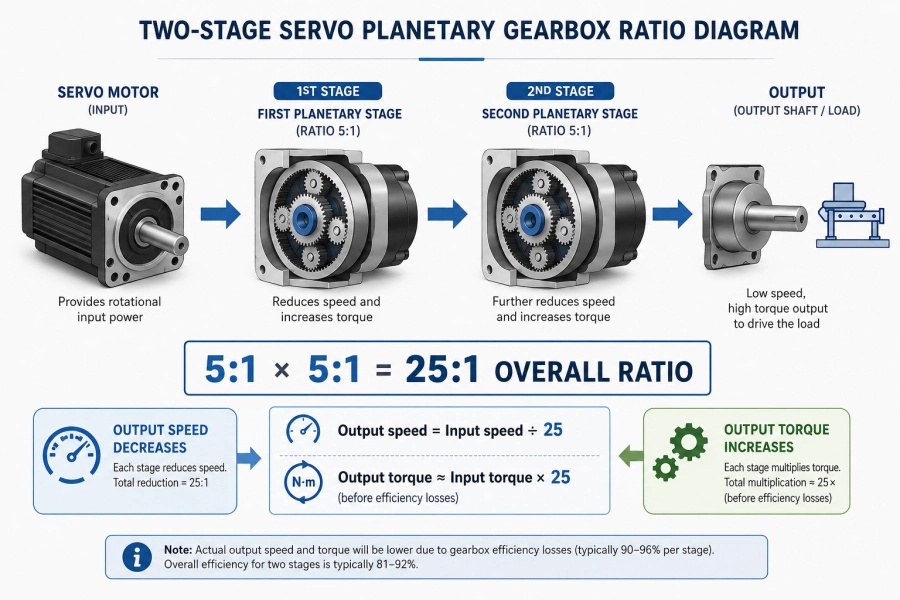
Two-stage servo planetary gearboxes are commonly used when higher reduction ratios are required in compact precision drive systems.
Step 2 — Check the Reflected Inertia Ratio
Inertia matching is one of the most important calculations in servo gearbox selection. A servo system may have enough torque, but still perform poorly if the load inertia is not matched properly to the motor.
When a gearbox is placed between the motor and the load, the effective load inertia seen by the motor is reduced by the square of the gear ratio.
Reflected load inertia = Load inertia ÷ Ratio²
Inertia ratio = Reflected load inertia ÷ Motor rotor inertia
A 5:1 gearbox reduces reflected load inertia by a factor of 25. A 10:1 gearbox reduces it by a factor of 100. This is one of the main advantages of using a planetary gearbox with a servo motor.
Many servo systems perform best when the inertia ratio is kept within a practical control range. The suitable range depends on motor size, controller capability, required acceleration, machine stiffness, and motion profile. If the calculated inertia ratio is too high, the system may become difficult to tune or may vibrate during acceleration and deceleration.
Step 3 — Confirm Output Torque and Peak Torque Capacity
After ratio and inertia have been checked, confirm whether the gearbox can safely transmit the required torque. Both continuous output torque and peak output torque should be reviewed.
Estimated continuous output torque = Motor continuous torque × Ratio × Gearbox efficiency
Continuous output torque should remain below the gearbox rated torque with an appropriate service factor. Applications with shock load, frequent acceleration, or long daily operating time may require a larger margin.
Peak torque occurs during acceleration, deceleration, emergency stop, or sudden load changes. Servo motors can often produce short-duration peak torque above the rated value. The gearbox must be able to tolerate these short peaks without tooth damage.
Do not confuse rated output torque with maximum momentary torque. Rated torque relates to long-term operation and service life. Momentary torque relates to short overload capacity.
Step 4 — Specify Backlash for Motion Control Accuracy
Backlash in a servo planetary gearbox is not a minor detail. It can directly affect positioning accuracy, repeatability, path control, and closed-loop stability.
The required backlash level depends on the machine accuracy requirement and how much of the total error budget can be allocated to gearbox backlash.
| Application Type | Typical Backlash Requirement | Selection Notes |
|---|---|---|
| General automation and conveying | About ≤15 arcmin | Suitable for non-critical positioning and simple drive systems. |
| CNC auxiliary axes and indexing | About ≤8 arcmin | Useful for moderate positioning accuracy and repeatability. |
| Servo-driven positioning and assembly | About ≤3 arcmin | Recommended where direction reversal accuracy is important. |
| Robotic joints and precision contouring | About ≤1 arcmin | Used where tool-tip accuracy or coordinated motion is demanding. |
For a deeper explanation of backlash selection, you can read our guide on low backlash planetary gearboxes.
Backlash should be selected according to the required positioning accuracy, repeatability, direction reversal behavior, and machine error budget.
Step 5 — Confirm the Motor Interface
A planetary gearbox for servo motor applications must mount cleanly to the motor. The input interface should match the motor flange, shaft diameter, shaft length, pilot diameter, and mounting standard.
Motor Flange Compatibility
Servo motor flange standards vary by brand and frame size. Confirm the exact motor model before ordering the gearbox. A suitable motor adapter helps maintain alignment and reduces installation risk.
Shaft Connection Method
Common shaft connection methods include clamping hub, key and keyway, and shrink disc. A clamping hub is often used in precision servo applications because it provides concentric, backlash-free clamping and is easy to assemble.
A precision gearbox with a poor input connection will not deliver its full accuracy at the load. The shaft connection method is part of the complete backlash and stiffness chain.
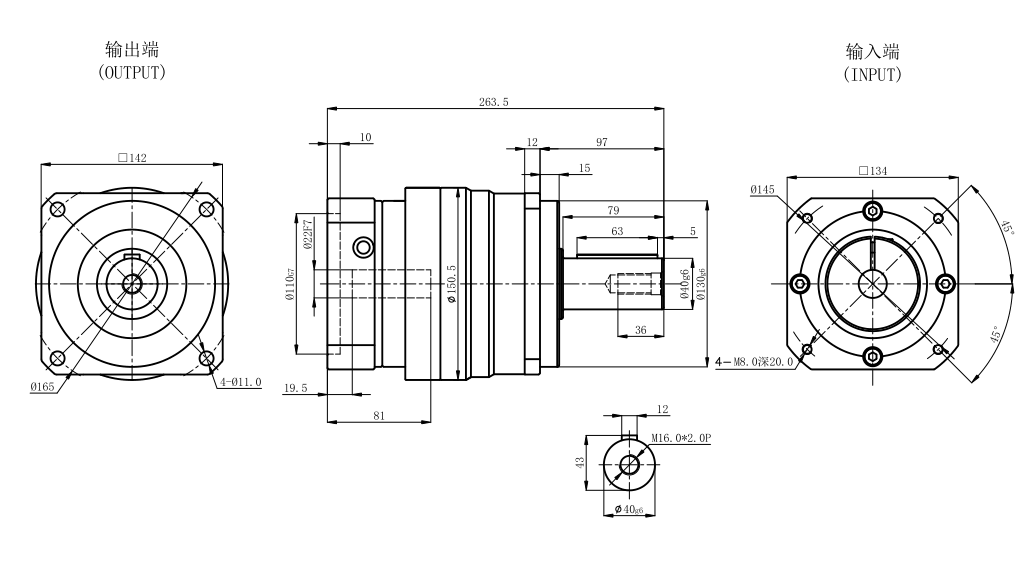
Step 6 — Confirm Mounting Configuration and Output Interface
Planetary servo gearboxes are commonly available in inline and right-angle configurations. The correct choice depends on the machine layout, motor location, available space, torque requirement, and accuracy requirement.
Inline Configuration
Inline planetary gearboxes place the input and output on the same axis. This structure is widely used in servo axes, robotics, CNC machinery, automation modules, and rotary positioning systems because it is compact and mechanically clean.
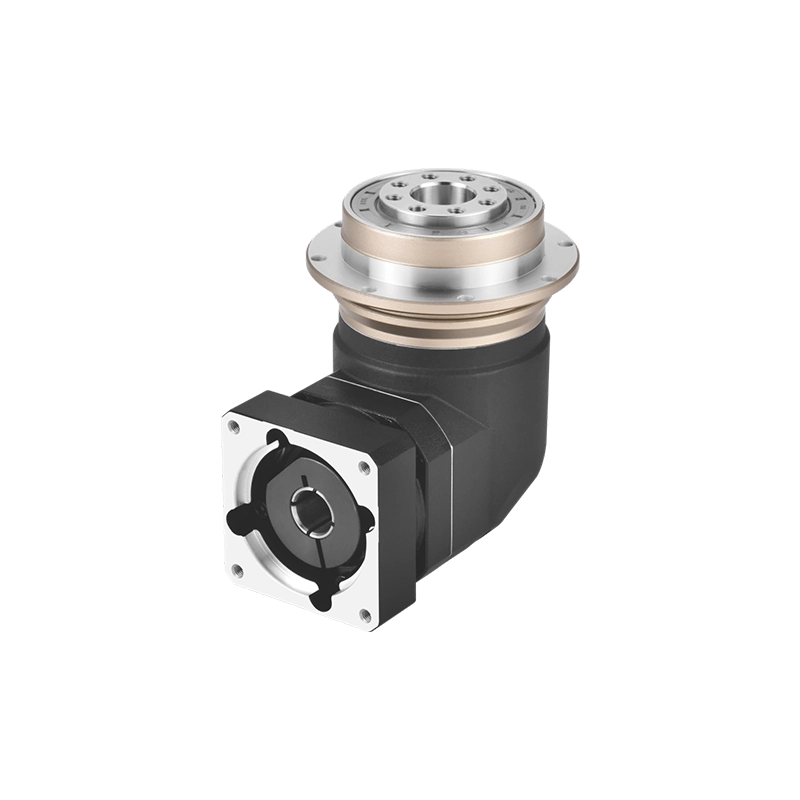
Right-Angle Configuration
Right-angle planetary gearboxes are used when the motor and load axes cannot be aligned. They are useful in space-constrained machines, but the right-angle stage may add additional backlash and efficiency loss compared with a similar inline design.
Output Interface
Output interfaces may include smooth shaft, keyed shaft, flanged output, or hollow bore. Confirm the output connection early so the gearbox can fit the machine without redesigning the coupling, flange, or mounting plate.
Step 7 — Check Thermal Rating for the Duty Cycle
Servo axes in automated production may run for many hours per day. A gearbox that is acceptable for intermittent duty may overheat or age faster in continuous-duty operation.
Every gearbox has a thermal limit. Heat is generated by gear mesh friction, bearing losses, seal friction, and lubricant churning. If the gearbox operates near its torque or speed limit for long periods, temperature rise should be checked carefully.
For high-duty-cycle applications, ask the servo planetary gearbox supplier about thermal rating, allowable input speed, lubrication condition, ambient temperature, and derating at elevated temperature.
Motor adapter, input clamping, output interface, mounting alignment, and thermal rating should all be confirmed before final gearbox selection.
Selecting a Servo Planetary Gearbox Manufacturer
The selection calculation gives you the specification. The next question is whether the manufacturer can supply a gearbox that meets the specification consistently.
A capable servo planetary gearbox manufacturer should be able to confirm backlash grade, ratio range, motor adapter availability, torque rating, torsional stiffness, thermal limit, mounting dimensions, and delivery options for standard or customized requirements.
For standard ratios and common motor interfaces, servo planetary gearbox wholesale or off-the-shelf procurement can be practical. For unusual ratios, non-standard flange sizes, high precision backlash requirements, or special output interfaces, a servo planetary gearbox supplier with customization support is more suitable.
Servo Planetary Gearbox Matching Checklist
Before ordering, check these points to reduce the risk of mismatch during machine commissioning.
Work With a Manufacturer for Servo Gearbox Matching
Matching a servo planetary gearbox or planetary gearbox for servo motor use is not only about choosing a ratio. The right gearbox should match the motor, load, inertia, torque profile, backlash requirement, mounting layout, and operating duty cycle.
Dongguan Zhuochuang Precision Machinery Co., Ltd manufactures precision planetary gearboxes and hollow rotary tables for automation systems, robotics, CNC machinery, packaging machinery, and precision motion control applications. If you are working through a servo gearbox selection, send us your motor model, required ratio, load data, speed, torque, backlash requirement, and mounting dimensions.
FAQ About Servo Planetary Gearboxes
What is a servo planetary gearbox?
A servo planetary gearbox is a precision reducer used with a servo motor to reduce speed, increase torque, improve inertia matching, and support accurate motion control.
How do I choose the right planetary gearbox for servo motor use?
Start by dividing the motor rated speed by the required output speed. Then check torque, reflected inertia, efficiency, backlash, motor interface, and available standard ratios before final selection.
Why is inertia matching important in servo systems?
Poor inertia matching can cause vibration, slow settling, difficult tuning, overshoot, or unstable motion. A gearbox helps reduce reflected load inertia by the square of the gear ratio.
Is low backlash necessary for every servo application?
Not always. General automation may accept moderate backlash, while robotics, CNC positioning, indexing, and precision assembly usually require lower backlash grades.
Related Gearbox Articles
Need Help Matching a Servo Planetary Gearbox?
Send us your servo motor model, required output speed, load inertia, torque profile, backlash requirement, duty cycle, and mounting layout. Our team can help review a suitable planetary gearbox selection.
Contact Us Now