







Low Backlash Planetary Gearbox: Why Backlash Matters in Servo Systems
Learn what planetary gearbox backlash means, why it affects servo positioning accuracy, how low backlash grades are specified, and what engineers should confirm before choosing a gearbox for robotics, CNC machinery, and precision automation.
Most mechanical problems announce themselves loudly through unusual noise, visible wear, vibration, or sudden failure. Backlash is different. It often appears quietly as positioning error, poor repeatability, surface finish issues, motion oscillation, and reduced accuracy in closed-loop servo systems.
Engineers who have traced positioning problems back to gearbox backlash tend to take it seriously when specifying the next drive. This article explains planetary gearbox backlash, what a low backlash planetary gearbox means, and how to choose the right backlash level for industrial motion control applications.

Low backlash planetary gearboxes are commonly used in servo-driven systems where positioning accuracy, repeatability, and stable direction reversal are important.
Key Points About Planetary Gearbox Backlash
Positioning Accuracy
Backlash creates a dead zone at the output shaft, reducing the practical accuracy of the motor and encoder system.
Direction Reversal
Every time a servo axis reverses direction, backlash must be taken up before motion is transmitted accurately.
Servo Stability
Excessive backlash can cause hunting, oscillation, overshoot, and poor dynamic response in closed-loop control.
Service Life
Backlash may increase over time due to wear, so selection should include margin for long-term performance.
What Backlash Actually Is and Where It Comes From
Backlash is the amount of free angular rotation at the output shaft when the input shaft is held stationary and the output is moved in both directions. It is usually measured in arcminutes or arcseconds and represents the dead zone between gear tooth contact reversal.
In a planetary gearbox, backlash comes mainly from gear tooth clearance, bearing play, and assembly tolerance stack-up. Some clearance is necessary because gear teeth need space for lubrication film, thermal expansion, and manufacturing tolerance. The goal is not to remove clearance completely in a normal gear mesh, but to control it precisely.
Gear Tooth Clearance
When gear teeth mesh, there must be a small amount of clearance between the tooth flanks. If the clearance is too large, output motion becomes less predictable during direction reversal. If it is too tight, thermal expansion and lubrication conditions may cause binding or excessive wear.
Bearing Play
The planet carrier, output shaft, and other rotating elements are supported by bearings. Any radial or axial play in these bearings can create small angular movement at the output shaft. Precision bearings and controlled preload help reduce this contribution.
Assembly Tolerance Stack-Up
Multiple parts assembled together create accumulated tolerances. Housing bore accuracy, carrier positioning, gear concentricity, and bearing alignment all influence the final measured backlash of the gearbox.
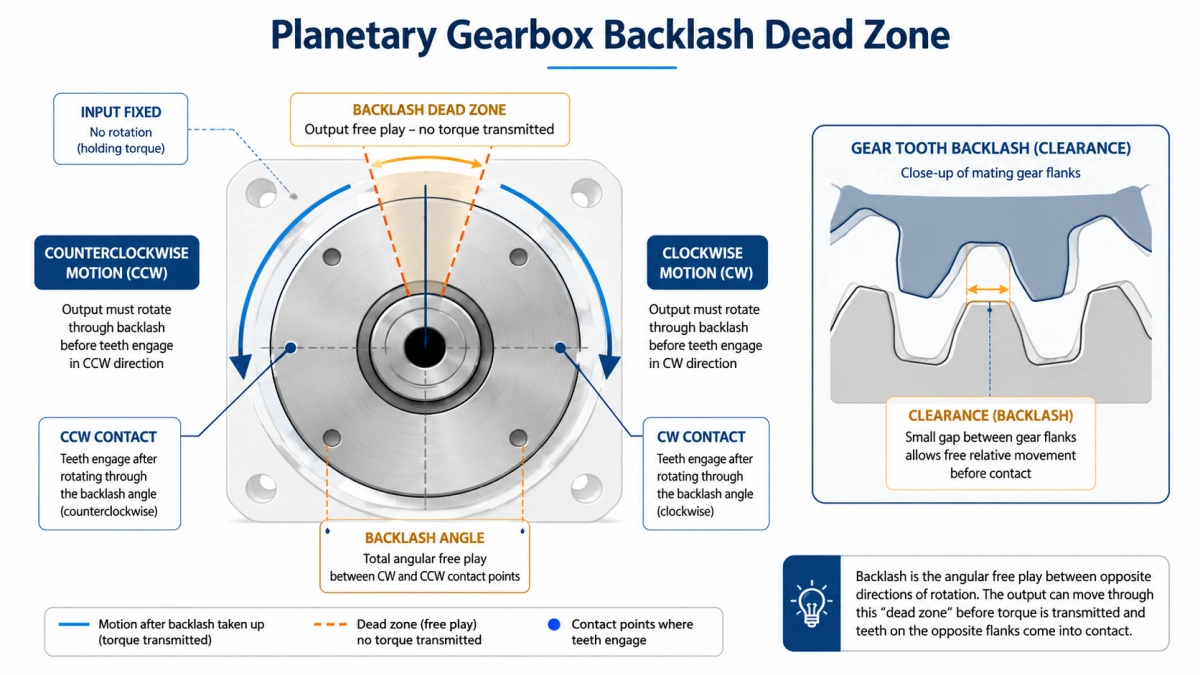
Backlash creates a small angular dead zone during direction reversal, which can reduce positioning accuracy in servo-driven systems.
Why Backlash Matters in Servo Systems
A servo motor with a high-resolution encoder may position its own shaft very accurately. However, if the motor is connected to a gearbox with excessive backlash, the encoder accuracy does not fully translate to the output shaft. The motor may reach its commanded position, while the load remains within a mechanical dead zone.
Positioning Error on Direction Reversal
Every time an axis changes direction, the output must pass through the backlash dead zone before motion is transmitted again. In CNC machinery, automated assembly stations, dispensing systems, or pick-and-place equipment, this can appear as direction-dependent positioning error.
Path Error in Coordinated Motion
Multi-axis motion requires all axes to respond together. If one axis lags due to backlash, the path can deviate from the commanded profile. This is important for CNC contouring, robotic welding, dispensing, laser processing, and precision handling applications.
Instability in Closed-Loop Control
A servo loop with high gain and significant mechanical backlash may become unstable. The controller commands a correction, the motor moves, but the output does not respond until the backlash is taken up. This can cause overshoot, hunting, vibration, or reduced dynamic performance.
Backlash Growth Over Service Life
Gearbox backlash can increase as gear teeth and bearings wear over time. A gearbox that meets the requirement when new should still have enough margin to remain useful after long-term operation.
Low Backlash Planetary Gearbox Grades
The backlash value on a gearbox datasheet should be read carefully. The measured value, testing method, load condition, and temperature condition all matter. A low backlash planetary gearbox should not only have a small number on paper, but also a repeatable measurement method and suitable manufacturing control.
| Backlash Grade | Typical Backlash Range | Typical Application |
|---|---|---|
| Standard | About 15–25 arcmin | General industrial drives, conveyors, simple speed reduction |
| Precision | About 5–10 arcmin | CNC auxiliary axes, moderate positioning, general servo drives |
| High Precision | About ≤3 arcmin | Servo positioning, robotics, indexing, automated assembly |
| Ultra Precision | About ≤1 arcmin | Semiconductor handling, optical systems, high-end precision equipment |
These values are general references. Actual backlash specifications should always be confirmed with the manufacturer according to gearbox model, ratio, stage count, testing method, load condition, and operating environment.
Low backlash performance depends on gear tooth accuracy, bearing preload, carrier rigidity, housing precision, and controlled assembly.
Zero Backlash Planetary Gearbox: Reality vs. Marketing
The term zero backlash planetary gearbox is often used in product listings, but it should be understood carefully. In a standard gear mesh, true zero backlash under all conditions is difficult to achieve because some clearance is normally required for lubrication, thermal expansion, and stable operation.
In practical industrial use, “zero backlash” often means the backlash is extremely small, sometimes below the measurement limit of standard testing methods, or small enough to be functionally negligible for the target application.
For most servo-driven applications, the key question is not whether the catalog says “zero backlash.” The important question is what the measured backlash value is, how it is tested, and whether that value is suitable for the required positioning accuracy.
Some designs reduce backlash by using preload, special gear geometry, or very tight manufacturing tolerances. Each approach has trade-offs. Preload can reduce free play, but it may increase no-load drag torque and heat. Precision manufacturing can reduce backlash without excessive preload, but requires tighter process control.
Low Backlash Inline Planetary Gearboxes
Low backlash inline planetary gearboxes are widely used in servo-driven automation. The motor connects on one side and the output shaft extends from the other side on the same axis. This coaxial arrangement is compact, clean, and well suited for precision motion control.
In an inline configuration, backlash mainly comes from the planetary gear stages themselves, bearing support, and assembly accuracy. Because there is no bevel, hypoid, or worm direction-changing stage, inline planetary gearboxes can often achieve low backlash more easily than many right-angle gearbox structures at the same cost level.
For equipment designers, this makes inline planetary gearboxes a practical choice for servo axes, linear modules, rotary positioning units, CNC auxiliary axes, robotic joints, and automated handling systems.
Zero-Backlash Robotic Planetary Gear Reducers
Robotics is one of the most demanding application areas for low backlash gear reducers. In a multi-axis robot arm, backlash at each joint can be amplified by the arm length and accumulated across the entire kinematic chain.
A small angular error at the joint can become a larger linear error at the tool tip. For example, with a long arm span, a few arcminutes of joint backlash can translate into visible positioning deviation at the end effector. This is why robotic applications often require high precision or ultra-precision gearbox grades.
The basic relationship can be estimated as:
Tool tip error ≈ link length × tan(backlash angle)
For collaborative robots, dispensing robots, welding robots, inspection systems, and precision handling equipment, backlash selection should be based on actual tool-tip accuracy requirements rather than only on gearbox catalog grade names.
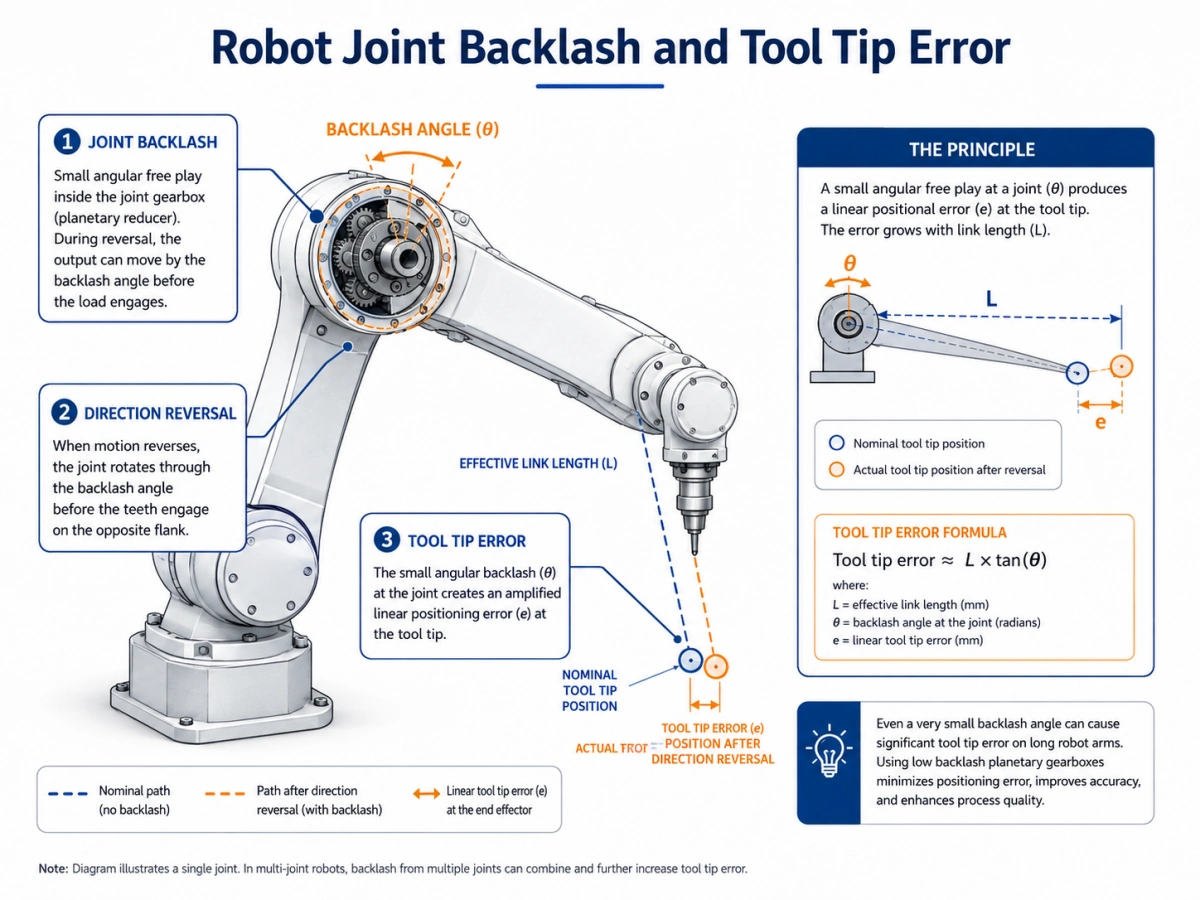
In robot joints, small angular backlash can be amplified into larger tool-tip positioning error depending on arm length and motion geometry.
How to Specify Backlash for Your Application
The correct backlash specification should be calculated from the application requirement, not selected only by catalog grade.
What to Look for When Buying a Low Backlash Planetary Gearbox
The backlash figure on a datasheet is only the starting point. Buyers should also check how the value is measured, whether each unit is tested, what manufacturing process is used, and how the gearbox is expected to perform over service life.
Ask How Backlash Is Measured
Ask whether backlash is measured on every unit or only estimated as a design specification. Unit-level testing is especially important for high precision servo applications.
Ask About Gear Manufacturing and Assembly Control
Gear tooth finishing, housing accuracy, carrier rigidity, bearing preload, and assembly process control all influence low backlash performance. A reliable supplier should be able to explain how backlash is controlled in manufacturing.
Confirm Motor Interface Compatibility
Even a low backlash gearbox can perform poorly if the motor interface is not properly matched. Confirm motor flange size, shaft diameter, input adapter design, mounting concentricity, and output connection requirements before ordering.
Consider Service Life
Backlash may increase with wear. Select a gearbox with sufficient margin so that the machine can maintain acceptable accuracy over the expected service life.
Work With a Manufacturer for Low Backlash Gearbox Selection
Planetary gearbox backlash is not a secondary specification. In servo-driven systems, it directly affects whether the drive chain can deliver the accuracy that the motor and controller are designed to achieve.
Dongguan Zhuochuang Precision Machinery Co., Ltd manufactures precision planetary gearboxes and hollow rotary tables for automation systems, robotics, CNC machinery, packaging machinery, and precision motion control applications. If you are selecting a low backlash planetary gearbox, provide your motor data, ratio, output load, positioning accuracy requirement, duty cycle, mounting size, and working environment.
FAQ About Low Backlash Planetary Gearboxes
What is backlash in a planetary gearbox?
Backlash is the small amount of free angular movement at the output shaft when the direction of load or motion reverses. It comes from gear tooth clearance, bearing play, and assembly tolerances.
Why is low backlash important in servo systems?
Low backlash helps improve positioning accuracy, repeatability, path control, and servo loop stability, especially in applications with frequent direction reversal or coordinated multi-axis motion.
Is a zero backlash planetary gearbox really zero backlash?
In practical terms, “zero backlash” usually means extremely low or functionally negligible backlash under defined testing conditions. Buyers should always confirm the measured value and test method.
How do I choose the right backlash grade?
Start from the required output accuracy, consider direction reversal, allocate an error budget, convert the allowable mechanical error into an angular backlash value, and add margin for service life.
Related Gearbox Articles
Need Help Choosing a Low Backlash Planetary Gearbox?
Send us your motor model, ratio, load, mounting size, positioning accuracy requirement, and duty cycle. Our team can help review the suitable backlash grade for your servo-driven application.
Contact Us Now